“The idea is perhaps geared a bit too much around the concept of a “driver” and the thinking that she is actively following what the car does.”
The purpose of Project Troglodyte is to hunt for bad patents and to show what went wrong. For more information, see the web page.
Zone Driving
This analysis is part of a series of Google driverless car related patents and applications. This application can be found here.
When reading the analysis it might be interesting to keep in mind that Google possibly uses this idea in their test cars all the time. It would be interesting to know how much the test drives are affected by it. If driverless car development wasn’t a sideshow for Google this could even have an impact on its market value as it could conceal the technology readiness level.

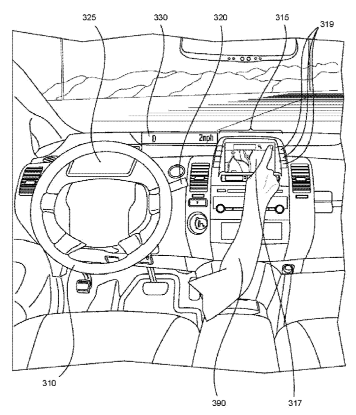
Figure 1.
TIER 1: SUMMARY
This application describes a way of generating, sharing and using information about areas where the driver might want to take control of an autonomous vehicle. These areas are called zones in the text. The idea is perhaps geared a bit too much around the concept of a “driver” and the thinking that they are actively following what the car does. I for one think the exact opposite is the reason to buy an autonomous vehicle in the first place.
My real problem with this idea is the wordplay; a zone is defined as a place where the autonomous vehicle is not that autonomous or where there is a risk that it can’t cope with the environment. If a company wants to come to market before it can handle every aspect of the traffic environment it need this sort of approach. For example the vehicle avoids certain types of intersections or areas of intense pedestrian traffic where it might not be able to move as the pedestrians would be very close. One might be able to argue that a system driving solely on highways needing the driver to take control when exiting the highway is using this system if it automatically recognizes the upcoming exit and gives a warning. This in turn is pretty much a must, as highways sometimes morph to regular roads. Defining the points where control is needed as zones makes it sound like this would be something completely new.
While I don’t know how novel this idea is (I didn’t do a prior art search) it is certainly a powerful way of categorising this information. After realising what is meant by a zone the rest of the related ideas kind of flow naturally.
I would imagine that this is something the development team stumbled into as they wanted to try the car before the algorithms were able to control it in all circumstances. The difficulty of environments likely varies greatly, so it is prudent to start with the easier ones to get some experience. Come to think of it, it is possible that the first autonomous cars will be limited in their ability to navigate completely independently as they probably will be developed from cars that have some of the required features but not all, for example from cars that will be able to drive in light traffic on divided highways.
One important aspect might also be the reluctance of drivers to leave all control to the computer, this fear would likely be alleviated if there was a possibility to set parameters that trigger a notification about difficult spots. As one of the main reasons to get an autonomous car is to be able to do something else when travelling, this sort of warning/notification feature might be a must for all early models.
I noted in some of the other driverless car analysis that they are transition period ideas, that is also true in this case. The proposed feature would get most use when the roads are not built for autonomous vehicles and people are not used to the new technology. After the transition period it might get very little use as it would be required only in exceptional circumstances.
TIER 2: AVOIDING LICENSING
The zone concept could be further developed by adding some parameters such as time of day, day of week, temperature, forecasted low friction, local rush hour etc. Pop-up zones could be created if a school bus is detected or a driver indicates that one is close by, this sort of zone could expire for example in 15 minutes. The computer could automatically generate zones if it needs to use unexpected deceleration or manoeuvre violently to avoid impact.
Further there could be a voting scheme to establish and remove a zone. For example if one driver indicates a zone is needed those approaching immediately behind would get a zone warning, but if none of them takes control of their autonomous vehicle the zone would not be established.
Two obvious methods of bypassing exist, the driver follows the situation closely or the car really is autonomous. Neither is good for the business of selling autonomous cars. One possibility might be to analyze map data constantly to identify spots where the computer might need help. Roadworks are often indicated by signs which can be recognized by cameras. Some places could be indicated by a special sign which might have an RF transmitter to make them detectable beyond visible range and add some determinism. These however do not quite reach the dynamic nature of the zone idea (its best contribution I think) which could prove to be quite difficult to bypass if this application is granted in its present form.
TIER 3: TECHNICAL ANALYSIS
The word vehicle is used throughout the text, by definition it includes things such as aircraft and helicopters. Autopilots have been in use in those for some time, devices such as autothrottle seem similar to the description of taking over part of the control from the computer. Aircraft autopilots also disengage if they lose control and naturally give a warning. Almost certainly modern autopilots can be engaged for a part of the planned route and be configured to give a warning before that part ends. For example an autopilot would be used through cruise and a warning would be given when the planned descent point is reached. If the descent point is called a zone, it is at a waypoint and the waypoint information can be found on a map which is downloaded from a server the similarities a quite noticeable.
Without the zone system drivers of early autonomous vehicles may feel the need to continuously monitor the performance of the car. With it they may first set a very strict warning level and include a lot of zones and after they feel more comfortable they can let the car do more and more of the driving by itself. Because the zones are proposed to be in a map, any route can be designed so that the number of zones on the route are as few as practicable. If the driver feels tired she can select a route that is a bit longer but has less zones in it and use the time to rest.
In the description it is noted that it is not sufficient for the vehicle to be close to the zone to trigger action, the vehicle also needs to be affected the by the zone in the future. For example if the vehicle is driving on a lane that is on top of the zone on a bridge, no action is required. This is important for the functioning of the zone concept as false positives could degrade user confidence in the system. To be able to solve this problem one needs understanding of the map side of the equation: when the route is planned and then followed, the computer knows which lane it is likely going to be on when the vehicle is close to the zone. The description of this is rather sketchy and actually making a system that does this requires some knowledge of an art that is not that closely related to the zone concept.
The claims are related to the description. As mentioned above some part of the idea may have novelty issues and this of course reflects on the claims that cover that part of the description.
Like this:
Like Loading...
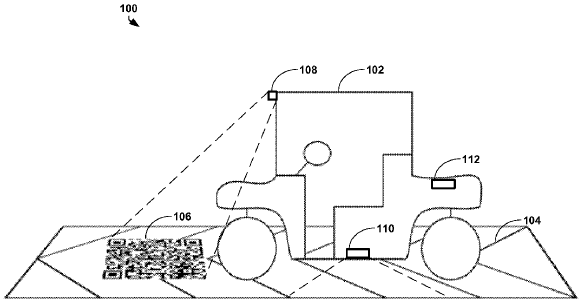 Figure 1.
Figure 1.